
Resumen
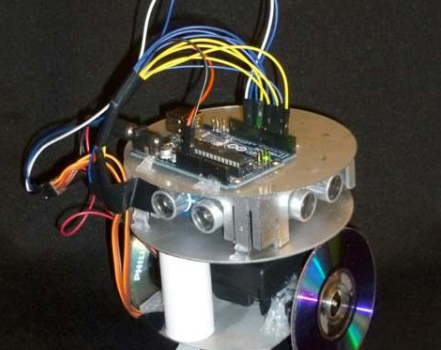
El objetivo de este trabajo es presentar los detalles principales del diseño del hardware y software de un robot autónomo que es capaz de desplazarse a través de un laberinto prediseñado, siguiendo trayectorias rectilíneas con desviaciones a 90 o 180º ante la detección de un borde o
pared del laberinto, cuando se interpone en su camino recto.
El diseño y la construcción de un prototipo de este robot se realizaron como parte del proyecto de grado de la materia “Aplicaciones en Tiempo Real” correspondiente al quinto año de la carrera de Ingeniería en Sistemas de Información de la Universidad Tecnológica Nacional -Facultad Regional La Plata.
Palabras clave: Robot autónomo, laberinto, sensores ultrasónicos, servomotores, placa Arduino.
Ver el trabajo: Robot Autónomo – TE_1
